Microfluidic Cartridge
In the past, medical diagnostic testing was often limited to medical laboratories and this process would frequently involve waiting hours or days before learning of the testing results, during which time care continued without the desired information. Point-of-care testing devices were developed to overcome the shortcomings of traditional measurements. Using a small compact laboratory on the chip or cartridge is one of the solutions to measuring blood ingredients in which blood flows throw the microchannel, chambers, and valve.
In the past, medical diagnostic testing was often limited to medical laboratories and this process would frequently involve waiting hours or days before learning of the testing results, during which time care continued without the desired information. Point-of-care testing devices were developed to overcome the shortcomings of traditional measurements. Using a small compact laboratory on the chip or cartridge is one of the solutions to measuring blood ingredients in which blood flows throw the microchannel, chambers, and valve.

microfluidic cartridge is configured to receive a blood sample and generate a sensory signal dependent on a concentration of a biomarker in the blood sample, and a cartridge reading assembly is configured to receive the microfluidic cartridge. The cartridge reading assembly includes a processing unit including one or more processors, and a machine-readable medium coupled to the processing unit, the machine-readable medium including instructions.
I studied on the different method of cartridge designing and fabrication in the order to develop affordable compact microfluidic cartridge which is able to create a sensory signal as fast as possible. In this way, we use an internal actuator to control the fluid throw the microchannels and valve by creating an intermittent vacuum. Capillarity and high-pressure drop of microchannel plus air leakage throw the layers of the cartridge are the challengeable factors which are deal with repeatability and reliability of the design. So that we studied on the different type of membrane layer and adhesive material to create stable valves and a miniature internal vacuum pump which all of them are actuated with external air supply. We also worked on pouch designing and manufacturing procedures to find the way for injecting our biomarker in the desired place.
Here are some pictures of our achievement related to the microfluidic cartridge.
I studied on the different method of cartridge designing and fabrication in the order to develop affordable compact microfluidic cartridge which is able to create a sensory signal as fast as possible. In this way, we use an internal actuator to control the fluid throw the microchannels and valve by creating an intermittent vacuum. Capillarity and high-pressure drop of microchannel plus air leakage throw the layers of the cartridge are the challengeable factors which are deal with repeatability and reliability of the design. So that we studied on the different type of membrane layer and adhesive material to create stable valves and a miniature internal vacuum pump which all of them are actuated with external air supply. We also worked on pouch designing and manufacturing procedures to find the way for injecting our biomarker in the desired place.
Here are some pictures of our achievement related to the microfluidic cartridge.
Respina1
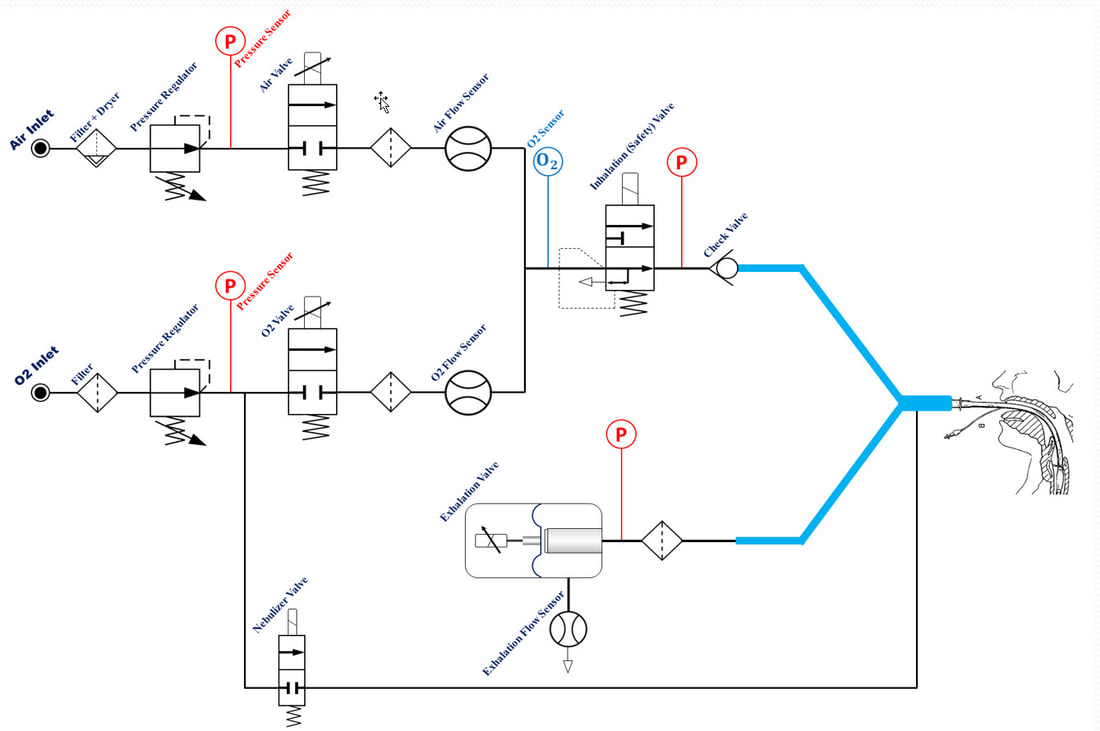
Respina1 is the first domestic life-support medical device which is designed to provide mechanical ventilation by moving breathable air into and out of the lungs, to deliver breaths to a patient who is physically unable to breathe, or breathing insufficiently. In this device, a complex algorithm is employed to push the desired volume of a mixture of air and O2 under controlled pressure to the patient. At the begging of Respina1, I started to study on the different controller to find the best algorithm for controlling this MIMO system. On the one hand air compressibility, time-vary parameter, disturbance and hysteresis and on the other hand limited processing power are the challenges that made control it difficult. However, in the first generation, I succeeded to apply the primary mode of ventilation by using a conventional controller and PI hysteresis model compensation feedforward.
Respina1 is the first domestic life-support medical device which is designed to provide mechanical ventilation by moving breathable air into and out of the lungs, to deliver breaths to a patient who is physically unable to breathe, or breathing insufficiently. In this device, a complex algorithm is employed to push the desired volume of a mixture of air and O2 under controlled pressure to the patient. At the begging of Respina1, I started to study on the different controller to find the best algorithm for controlling this MIMO system. On the one hand air compressibility, time-vary parameter, disturbance and hysteresis and on the other hand limited processing power are the challenges that made control it difficult. However, in the first generation, I succeeded to apply the primary mode of ventilation by using a conventional controller and PI hysteresis model compensation feedforward.
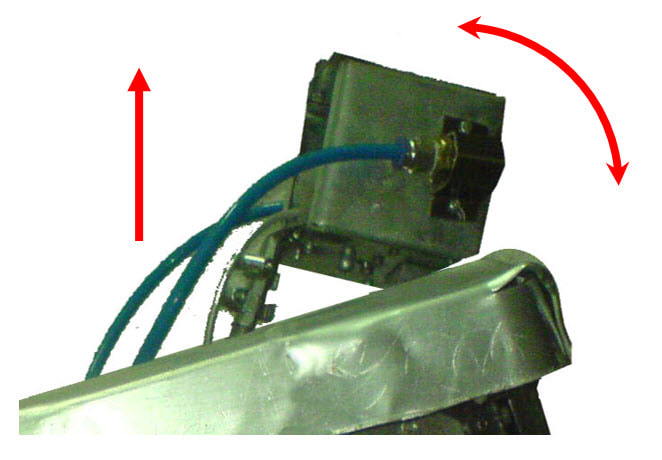
After two years I continued my job as a mechanical designer with responsibility for designing two critical valves of ventilator: safety and exhalation valves. These valves are used to control emergency condition and precise lung pressure regulating in the ventilator. To reach precise results it was necessary to design and produce special soft material known as silicon membranes with appropriate stiffness in both valves
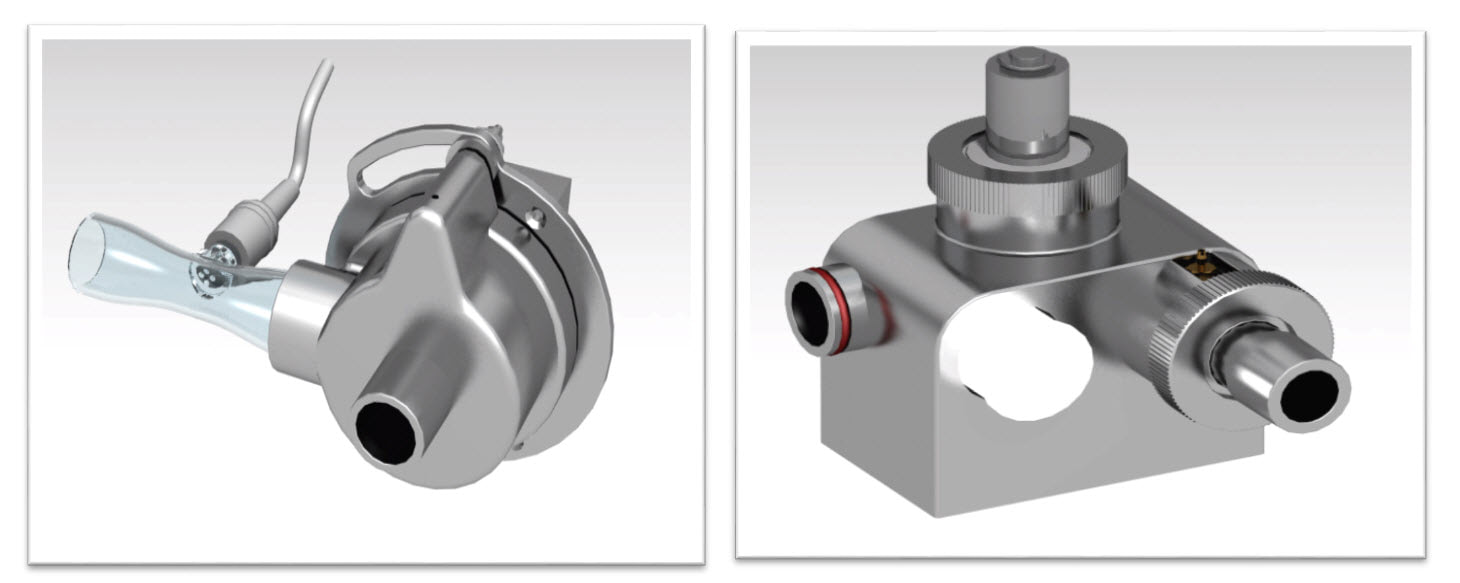
There are some pictures of Respina1 circuits and parts.
KIARASH
(Kid Inspired Autonomous Robot Augmented with Sense of Human)
Responsibility:
I completed KIRASH as Project director, beside I designed aluminum structure and body cover as team.
Description:
KIARASH is an affordable platform with the 3D-printed body cover and the high strength aluminum frames equipped with human-liked sensors and an advanced computational power.
The dynamic motion ability enables the platform to be used for entertainment, education and research purposes. In KIARASH it has been focused on robustness, weight reduction and also a nimble reaction.
(Kid Inspired Autonomous Robot Augmented with Sense of Human)
Responsibility:
I completed KIRASH as Project director, beside I designed aluminum structure and body cover as team.
Description:
KIARASH is an affordable platform with the 3D-printed body cover and the high strength aluminum frames equipped with human-liked sensors and an advanced computational power.
The dynamic motion ability enables the platform to be used for entertainment, education and research purposes. In KIARASH it has been focused on robustness, weight reduction and also a nimble reaction.
Kiarash Spesifiction:
This video shows different steps of standing condition of KIARASH:
- Adjust omin-directional walking
- Wireless remote communication
- 3-axis gyro, 3-axis accelerometer, detection microphone
- Default walking speed : 30.0 cm/sec
- Management controller : ARM CortexA4 STM32F103 700MHZ
- 20 actuator modules (6 DOF leg×2+3 DOF arm×2+2 DOF neck )
- Battery (30 minutes of operations ), charger, and external power adapter
- Includes DRS-201 & DRS-401 durable Herkulex actuators with metallic gears
- Embedded PC : Intel Celeron processor 1037U (dual core) , 2GB DDR3 , 64GB SSD
- Management controller : ARM CortexA4 700MHZ
This video shows different steps of standing condition of KIARASH:

Walking mode of KIARASH is shown in this Video:

Teen Size Humanoid robot
Responsibility:
Technical chief, Head of mechanical team.
Description:
Two version of teen-size robot was produced namely Akbar and Asghar. All information about these robots are in TDP of AutMan team which released for qualification in Robocop 2015
https://www.researchgate.net/publication/273135810_AUT-UofM_Humanoid_TeenSize_Team_Description_Paper_RoboCup_2015_Humanoid_TeenSize_Robot_League
Here is the pictures of Teen Size:
Responsibility:
Technical chief, Head of mechanical team.
Description:
Two version of teen-size robot was produced namely Akbar and Asghar. All information about these robots are in TDP of AutMan team which released for qualification in Robocop 2015
https://www.researchgate.net/publication/273135810_AUT-UofM_Humanoid_TeenSize_Team_Description_Paper_RoboCup_2015_Humanoid_TeenSize_Robot_League
Here is the pictures of Teen Size:
Here is qualification video:
Oorenj:
Responsibility:
I cooperate with Oorenj team as Mechanical Designer.
Description:
Oorenj is the small model of Autonomous Surface Vehicle which designed for crafting on the water without crews. Oorenj is used in diverse research area including oceanography and hydrography as weather-ship but so cheaper and more efficient. Data collection over the sea is always deal with time and energy consuming crafting, moreover, it can be dangerous for crews in an unstable climate. So the place of unman vehicle with solar cell power as energy sources become more vital.
Oorenj is able to be controlled with two modes:
First, the operator, who controls boat, can directly navigate boat with full access to sensors and trust motor from the far distance as long as 1 km and a maximum speed of 30 knots. All data contain velocity, acceleration, traced points, battery energy, and climate patterns with high resolution image of sea wave are recorded.
In the second mode boat crafts in pre-defined trajectory autonomously and despite wave disturbance and wind force, it can remain the desired trajectory by controlling the rudder. Usage of GPS and Compass collectively contribute to accurate position tracking.
Here is technical specification of Oorenj:
Maximum speed : 30 not Propeller material: 3 blade plastic
Maneuver radius : 1m Trust Motor Power: 1000 Watt
Length: 100 cm Body material: Fiber glass
Width: 30 cm Stall torque servo: 12 Kg.cm
Height: 14.4 cm Battery: LiPo 24V 5000mA
Responsibility:
I cooperate with Oorenj team as Mechanical Designer.
Description:
Oorenj is the small model of Autonomous Surface Vehicle which designed for crafting on the water without crews. Oorenj is used in diverse research area including oceanography and hydrography as weather-ship but so cheaper and more efficient. Data collection over the sea is always deal with time and energy consuming crafting, moreover, it can be dangerous for crews in an unstable climate. So the place of unman vehicle with solar cell power as energy sources become more vital.
Oorenj is able to be controlled with two modes:
First, the operator, who controls boat, can directly navigate boat with full access to sensors and trust motor from the far distance as long as 1 km and a maximum speed of 30 knots. All data contain velocity, acceleration, traced points, battery energy, and climate patterns with high resolution image of sea wave are recorded.
In the second mode boat crafts in pre-defined trajectory autonomously and despite wave disturbance and wind force, it can remain the desired trajectory by controlling the rudder. Usage of GPS and Compass collectively contribute to accurate position tracking.
Here is technical specification of Oorenj:
Maximum speed : 30 not Propeller material: 3 blade plastic
Maneuver radius : 1m Trust Motor Power: 1000 Watt
Length: 100 cm Body material: Fiber glass
Width: 30 cm Stall torque servo: 12 Kg.cm
Height: 14.4 cm Battery: LiPo 24V 5000mA
TIKA:
Responsibility:
I had an opportunity to be a member of Tika group for producing Tika2 and Tika3 as Mechanical Designer and Electrical advisor due to having deep knowledge of electric motor and compatible Driver.
Description:
Tika3 is the 4-seats hybrid car, which is a development of engine car. We changed the body of candidate car with glass fiber and attached 7HP electrical motor. Tika3 is profited by parallel power transmission system, which electric motor is connected to gearbox directly with belt and pulley. Simple and reasonable mechanical modifications of cheap engine cars contrast with pricey hybrid cars contributed to use this method on Tika3.
Here is some specification of Tika3
Hybrid type: Parallel
Car type: Sedan 4 seats
Power source: Petrol, Electricity
Weight: 800 kg
Electric motor: DC traction motor 7 HP
Maximum speed: 120 km/h
Engine: Internal consumption 50 HP
Energy consuming: 4 lit per 100 km in Highway, 6 lit per 100 km in City
Torque: 70 N.m
Designing and manufacturing of Tika3 were completed in 3 stage of Concept Design, Detail Design and Sample Production, however it was a primary sample. To analyze the performance of Tika3, it was applied extensive functional test by participating in Third Iranian Machine Design Competition (Hybrid Vehicle), Sharif University, Tehran, Iran. Following pictures illustrate body concept design of Tika3:
Responsibility:
I had an opportunity to be a member of Tika group for producing Tika2 and Tika3 as Mechanical Designer and Electrical advisor due to having deep knowledge of electric motor and compatible Driver.
Description:
Tika3 is the 4-seats hybrid car, which is a development of engine car. We changed the body of candidate car with glass fiber and attached 7HP electrical motor. Tika3 is profited by parallel power transmission system, which electric motor is connected to gearbox directly with belt and pulley. Simple and reasonable mechanical modifications of cheap engine cars contrast with pricey hybrid cars contributed to use this method on Tika3.
Here is some specification of Tika3
Hybrid type: Parallel
Car type: Sedan 4 seats
Power source: Petrol, Electricity
Weight: 800 kg
Electric motor: DC traction motor 7 HP
Maximum speed: 120 km/h
Engine: Internal consumption 50 HP
Energy consuming: 4 lit per 100 km in Highway, 6 lit per 100 km in City
Torque: 70 N.m
Designing and manufacturing of Tika3 were completed in 3 stage of Concept Design, Detail Design and Sample Production, however it was a primary sample. To analyze the performance of Tika3, it was applied extensive functional test by participating in Third Iranian Machine Design Competition (Hybrid Vehicle), Sharif University, Tehran, Iran. Following pictures illustrate body concept design of Tika3:


However, due to financial and equipment limitation, final Tika3 was different in the body shape. Here is picture of final Tika3.

Break test of Tika3 is shown in the following link.
Tika2 was the second version of TIKA series which was planned in 2009 and started with one seat electric car Tika1 for introducing electric vehicle design procedure and identifying possible obstacles in the more commercial way. Subsequent, the trend was promoted to produce more spacious electric car Tika2, which it was a modification of small engine car in order to replace diesel motor with a 7HP electric motor. Moreover, power transition line was completely changed into the new gearbox and chains. The following table shows some specification of Tika2.
Car type: Hatchback, 2 seats
Gearbox: 4 speed
Power source: 8x12V, 50A Battery
Weight: 500 kg
Stall torque: 70 N.m
Maximum speed: 68 km/h
Motor: DC traction 7 HP
Range: 50 Km
Tika2 was exactly designed in 3 stage same as Tika3, moreover, concept design takes long 8 months. Body concept design of Tika2 is shown in below.
Car type: Hatchback, 2 seats
Gearbox: 4 speed
Power source: 8x12V, 50A Battery
Weight: 500 kg
Stall torque: 70 N.m
Maximum speed: 68 km/h
Motor: DC traction 7 HP
Range: 50 Km
Tika2 was exactly designed in 3 stage same as Tika3, moreover, concept design takes long 8 months. Body concept design of Tika2 is shown in below.

We have verified Tika-2 by taking apart in second Iranian Machine Design Competition (Hybrid Vehicle), Sharif University, Tehran, Iran. Final product with minor differences is presented below!


PASARGAD:
Responsibility:
I worked on Pasargad series as Project director, Also I was head of mechanic team.
Description:
The increasing need of employing robots in environments which are too harsh for humans has led to vast researches in the field of robotics. In particular, rescue robots have attracted the attention of many researchers worldwide, due to their urgent applications. Due to geographical nature of Iran and the high possibility of earthquakes and other catastrophes, it was decided to design rescue robot series.
Pasargad is a remote operation robot that can operate in various unpredictable environments and can cope with rare conditions such as electrical shocks, high moisture, and electronic and communication disturbances. Pasargad is 10 kg lighter than previous version owing to gain light chaises and optimum redesign of mechanical parts. It is employed more advanced equipment to reach better performance, moreover, Pasargad has the one flexible arm with 6 degree of freedom that provides a wide searching area to detect victim.
Responsibility:
I worked on Pasargad series as Project director, Also I was head of mechanic team.
Description:
The increasing need of employing robots in environments which are too harsh for humans has led to vast researches in the field of robotics. In particular, rescue robots have attracted the attention of many researchers worldwide, due to their urgent applications. Due to geographical nature of Iran and the high possibility of earthquakes and other catastrophes, it was decided to design rescue robot series.
Pasargad is a remote operation robot that can operate in various unpredictable environments and can cope with rare conditions such as electrical shocks, high moisture, and electronic and communication disturbances. Pasargad is 10 kg lighter than previous version owing to gain light chaises and optimum redesign of mechanical parts. It is employed more advanced equipment to reach better performance, moreover, Pasargad has the one flexible arm with 6 degree of freedom that provides a wide searching area to detect victim.


Before the final version of Pasaragad was produced as the high technological robot with robust data transferring, later versions had been made progress gradually for 5 years. During mention period numerous experience was conducting which helped all parts of the robot including, Mechanic, Electronic, AI and data transmission to organize designs optimally. There are some pictures that show the trend.
The new mechanism was developed as well as Variable Shape Wheel is designed and profited.
The new mechanism was developed as well as Variable Shape Wheel is designed and profited.
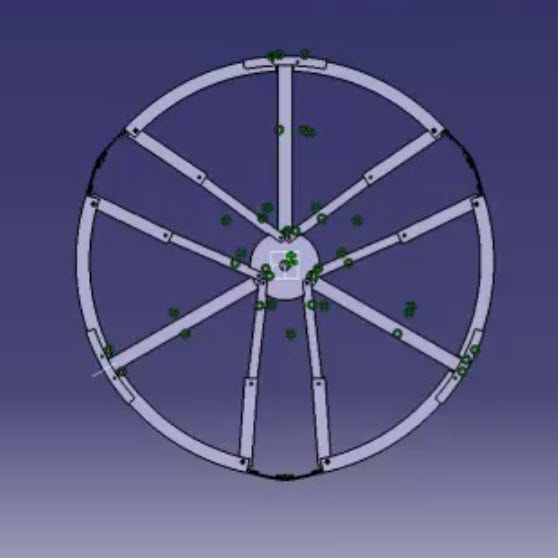
Shape Shifting Wheel
Continuous tracking mechanism has been always first choice for equipping ground vehicles to deal with unpredictable environment, however it has many disadvantages which lead designer to profit from new better mechanism. Due to fully metal parts of continuous tracking mechanism it is so heavy and also it waste a lot of energy to move. Large contact’s surface in this mechanism is contributed with high friction during movement and maneuvering. Also, hard to maintenance and fixing or replacing are the other disadvantages.
Using wheel with off road suspensions is another way to deal with obstacles, its light, and more efficient and it can provide high speed on the flat ground. But no one can hide the fact that this mechanism are not useful against the step shape obstacle.
In this order we opt for a solution that has the advantages of both systems. A system with the benefits of wheel mechanism and also ability of climbing rocky ground. In this idea we designed compact shape-shifting wheel which is normally act as wheel in flat ground and changes its shape to star shape during climbing.
Following pictures shows the different shapes of this wheel.
Continuous tracking mechanism has been always first choice for equipping ground vehicles to deal with unpredictable environment, however it has many disadvantages which lead designer to profit from new better mechanism. Due to fully metal parts of continuous tracking mechanism it is so heavy and also it waste a lot of energy to move. Large contact’s surface in this mechanism is contributed with high friction during movement and maneuvering. Also, hard to maintenance and fixing or replacing are the other disadvantages.
Using wheel with off road suspensions is another way to deal with obstacles, its light, and more efficient and it can provide high speed on the flat ground. But no one can hide the fact that this mechanism are not useful against the step shape obstacle.
In this order we opt for a solution that has the advantages of both systems. A system with the benefits of wheel mechanism and also ability of climbing rocky ground. In this idea we designed compact shape-shifting wheel which is normally act as wheel in flat ground and changes its shape to star shape during climbing.
Following pictures shows the different shapes of this wheel.
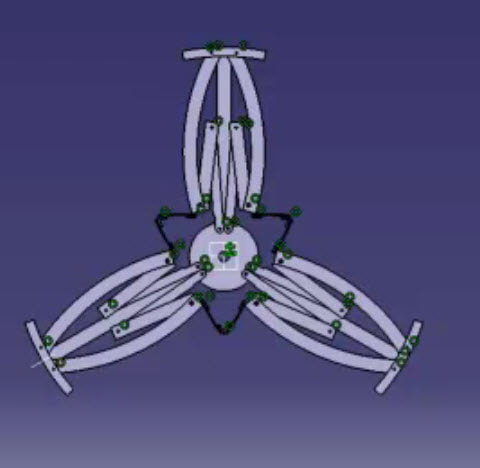

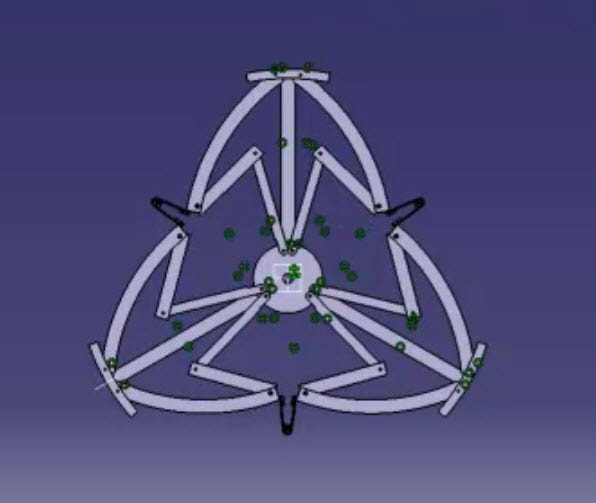


Star and triangular shapes are good strategies for moving on muggy and sandy ground same as climbing stairs and or stones. Below video shows the transformation steps.

PHOENIX
Responsibility:
I have started to produce applicable robots with Phoenix since 2008 as a mechanical designer.
Description:
Phoenix is firefighter robot which is supposed to reduce the exposure of human firefighters to extreme fires, moreover, with additional facilities, it can be used in various inspection task range from fuel explosions, chemical leaks, and huge pressure vessel. The first version of Phoenix is focused on detecting and extinguish the fire.
Autonomous fire detecting and auto-routing depend on high rate calculation of online data gained from embedded mini pc can be a few advantages of profiting artificial intelligence. First images are captured with HD camera and after analyzing along Cognition layer, which detects the object by color classification, data are acquired by Behavior layer. Finally, the proper decision is made with considering circumstance including explorer mode for finding flame, fighting with fire and alarming.
Here are some photos of Phoenix:
Responsibility:
I have started to produce applicable robots with Phoenix since 2008 as a mechanical designer.
Description:
Phoenix is firefighter robot which is supposed to reduce the exposure of human firefighters to extreme fires, moreover, with additional facilities, it can be used in various inspection task range from fuel explosions, chemical leaks, and huge pressure vessel. The first version of Phoenix is focused on detecting and extinguish the fire.
Autonomous fire detecting and auto-routing depend on high rate calculation of online data gained from embedded mini pc can be a few advantages of profiting artificial intelligence. First images are captured with HD camera and after analyzing along Cognition layer, which detects the object by color classification, data are acquired by Behavior layer. Finally, the proper decision is made with considering circumstance including explorer mode for finding flame, fighting with fire and alarming.
Here are some photos of Phoenix:
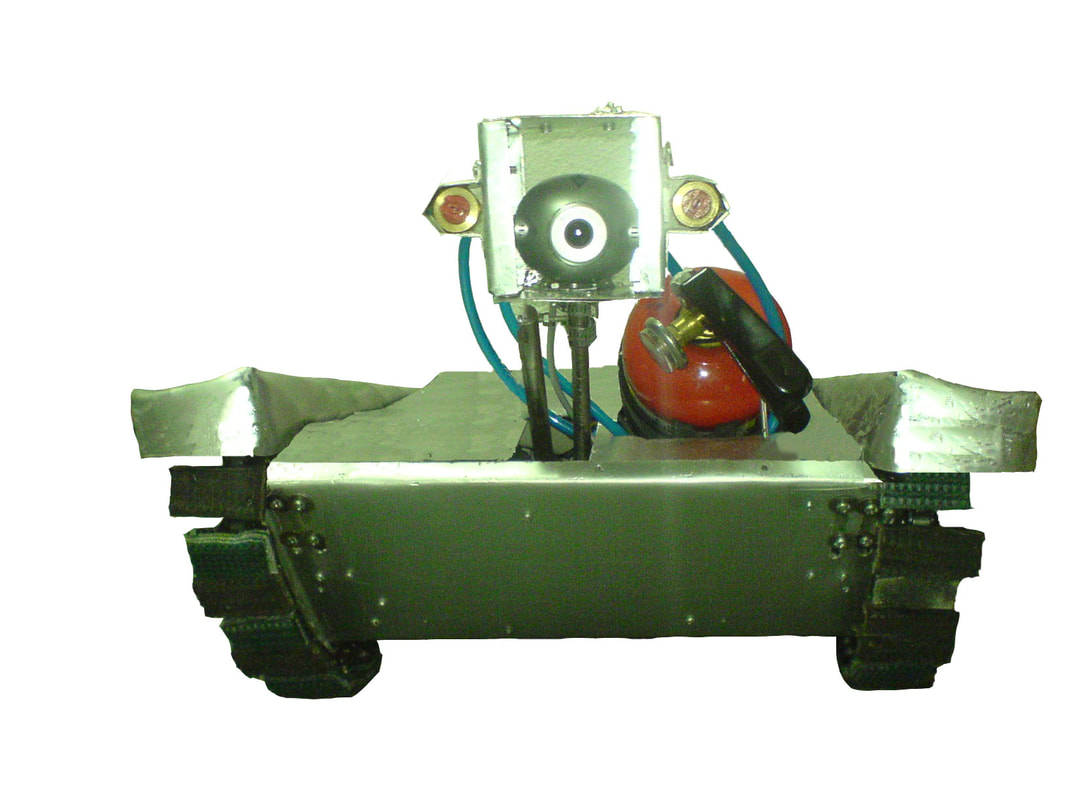

Also, Phoenix is armed with a metal shield to have enough strength in expose of a high-temperature condition. Moreover, it is equipped with rotary joint under the camera which provides different angle view and precise targeting for strike extinguish material throw the fire. In addition, two nozzles are responsible for spraying fighting foam, which is controlled by puppet valve, directly commended from behavior layer.